Conocimiento general de los UAS en drones A1/A3: componentes, sensores, GNSS, baterías y limitaciones técnicas
Última actualización: mayo 2026
Por qué este tema genera errores en examen y en vuelo
Muchos alumnos afrontan el bloque de conocimiento general de los UAS pensando que únicamente trata sobre “partes del dron”. Sin embargo, en el examen oficial A1/A3 este apartado mezcla conceptos técnicos con interpretación práctica del funcionamiento real del sistema.
Las preguntas no suelen centrarse solo en memorizar nombres de componentes, sino en comprender:
- qué ocurre si un sensor falla,
- cómo afecta el viento al sistema de estabilización,
- qué consecuencias tiene una batería degradada,
- por qué se pierde la señal GNSS,
- o cómo responde el dron ante una pérdida de enlace.
En operaciones reales, muchos incidentes ocurren precisamente por desconocer limitaciones técnicas básicas:
- despegues con mala señal satelital,
- baterías hinchadas o desequilibradas,
- calibraciones incorrectas,
- interferencias en el enlace de control,
- o confianza excesiva en funciones automáticas.
Uno de los errores más habituales en alumnos principiantes es pensar que el dron “vuela solo”.
En realidad:
- el piloto sigue siendo responsable de la operación,
- los sistemas automáticos tienen limitaciones,
- y muchas ayudas dependen completamente del correcto funcionamiento de sensores y señal GNSS.
Este tema es especialmente importante porque conecta directamente con:
- seguridad operacional,
- factores humanos,
- gestión del riesgo,
- y procedimientos previos al vuelo.
Índice de contenidos conocimiento UAS
- Qué es un UAS
- Componentes principales de un UAS
- Sistema de control de vuelo
- Enlace de control y transmisión
- Sensores de posicionamiento
- GNSS y navegación satelital
- Sistemas de estabilización
- Control de altitud
- Baterías LiPo
- Gestión de batería
- Firmware del sistema
- Actualizaciones del sistema
- Limitaciones técnicas de los drones
- Escenarios operativos reales
- Errores frecuentes en el examen
- Diferencias importantes
- Consejos prácticos para el examen AESA
- FAQ avanzada sobre conocimiento general de los UAS
Qué es un UAS
La normativa europea utiliza el término UAS (Unmanned Aircraft System) para referirse al conjunto completo del sistema no tripulado.
Muchos estudiantes creen erróneamente que UAS significa únicamente “dron”.
Eso es incorrecto.
Un UAS incluye:
| Elemento | Función |
|---|---|
| Aeronave no tripulada | El dron en sí mismo |
| Estación de control | Mando o dispositivo de control |
| Enlace de control | Comunicación entre piloto y aeronave |
| Sistemas de navegación | GNSS, brújula y sensores |
| Software/Firmware | Control lógico del sistema |
| Elementos de seguridad | RTH, limitadores y failsafe |
La normativa EASA trata el UAS como un sistema completo porque la seguridad depende de todos los elementos funcionando conjuntamente.
Componentes principales de un UAS

Aeronave
Es la parte voladora del sistema.
Incluye:
- estructura,
- motores,
- hélices,
- batería,
- controladora de vuelo,
- sensores,
- cámaras,
- y antenas.
Muchos fallos operacionales comienzan por problemas aparentemente simples:
- hélices dañadas,
- motores con suciedad,
- vibraciones,
- o mala fijación de baterías.
Estación de control
Es el dispositivo utilizado por el piloto para controlar el dron.
Puede ser:
- emisora física,
- tablet,
- teléfono móvil,
- o combinación de varios dispositivos.
La estación de control:
- transmite órdenes,
- recibe telemetría,
- muestra alertas,
- y permite activar funciones automáticas.
Enlace de control
Es la comunicación entre el piloto y el dron.
Sin enlace de control:
- el piloto pierde capacidad de mando,
- y el sistema debe activar procedimientos automáticos de seguridad.
Sistema de control de vuelo
La controladora de vuelo es uno de los elementos más importantes del UAS.
Actúa como el “cerebro” del dron.
- Recibe información de:
-
-
-
- sensores,
-
-
-
-
-
- GNSS,
-
-
-
-
-
- brújula,
-
-
-
-
-
- acelerómetros,
-
-
-
-
-
- giroscopios,
-
-
-
-
-
- y órdenes del piloto.
-
-
Después calcula:
-
-
-
- potencia de motores,
-
-
-
-
-
- estabilidad,
-
-
-
-
-
- orientación,
-
-
-
-
-
- y respuesta automática.
-
-
Cómo interpreta el dron las órdenes del piloto
Cuando el piloto mueve los sticks:
-
-
-
- la orden se transmite,
-
-
-
-
-
- la controladora interpreta el movimiento,
-
-
-
-
-
- y ajusta cada motor individualmente.
-
-
Por ejemplo:
-
-
-
- para avanzar,
-
-
-
-
-
- unos motores aceleran,
-
-
-
-
-
- y otros reducen potencia.
-
-
Muchos alumnos creen que todos los motores giran siempre igual.
Eso es falso.
La estabilidad depende de variaciones continuas de potencia entre motores.
Enlace de control y transmisión
Qué hace el enlace de control
El enlace de control permite:
-
-
-
- enviar órdenes,
-
-
-
-
-
- recibir vídeo,
-
-
-
-
-
- recibir telemetría,
-
-
-
-
-
- y mantener control operacional.
-
-
Problemas habituales
El enlace puede degradarse por:
-
-
-
- obstáculos,
-
-
-
-
-
- edificios,
-
-
-
-
-
- interferencias,
-
-
-
-
-
- antenas mal orientadas,
-
-
-
-
-
- saturación electromagnética,
-
-
-
-
-
- distancia excesiva.
-
-
Error frecuente de examen
Muchos alumnos piensan que:
“si todavía veo el dron, siempre tendré señal”.
Incorrecto.
Puede existir:
-
-
-
- visión directa,
-
-
-
-
-
- pero pérdida parcial de enlace.
-
-
Sensores de posicionamiento
Los drones modernos utilizan múltiples sensores para:
-
-
-
- estabilización,
-
-
-
-
-
- navegación,
-
-
-
-
-
- mantenimiento de posición,
-
-
-
-
-
- control automático.
-
-
Tipos principales de sensores
| Sensor | Función |
|---|---|
| Giroscopio | Detecta rotación |
| Acelerómetro | Detecta aceleración |
| Brújula | Detecta orientación magnética |
| Barómetro | Calcula altitud relativa |
| Sensores ópticos | Estabilización cercana al suelo |
| GNSS | Posicionamiento global |
Qué ocurre si fallan sensores
Dependiendo del fallo:
-
-
-
- el dron puede perder estabilidad,
-
-
-
-
-
- entrar en ATTI mode,
-
-
-
-
-
- desplazarse con el viento,
-
-
-
-
-
- o perder precisión.
-
-
GNSS y navegación satelital
GNSS significa:
Global Navigation Satellite System.
Incluye sistemas como:
-
-
-
- GPS,
-
-
-
-
-
- Galileo,
-
-
-
-
-
- GLONASS,
-
-
-
-
-
- BeiDou.
-
-
Muchos drones utilizan varios sistemas simultáneamente.
Funciones del GNSS
El GNSS permite:
-
-
-
- mantener posición,
-
-
-
-
-
- calcular velocidad,
-
-
-
-
-
- activar Return To Home,
-
-
-
-
-
- registrar punto de despegue,
-
-
-
-
-
- estabilizar vuelo.
-
-
Problemas típicos con GNSS
La señal satelital puede degradarse por:
-
-
-
- edificios altos,
-
-
-
-
-
- túneles,
-
-
-
-
-
- montañas,
-
-
-
-
-
- estructuras metálicas,
-
-
-
-
-
- interferencias,
-
-
-
-
-
- condiciones atmosféricas.
-
-
Error típico de examen
Muchos estudiantes creen que:
“si el dron despega, el GNSS funciona correctamente”.
No necesariamente.
El dron puede despegar:
-
-
-
- con pocos satélites,
-
-
-
-
-
- o sin fijación estable.
-
-
Eso aumenta muchísimo el riesgo de deriva.
Sistemas de estabilización
Los sistemas de estabilización ayudan al dron a:
-
-
-
- mantenerse nivelado,
-
-
-
-
-
- corregir movimientos,
-
-
-
-
-
- compensar viento,
-
-
-
-
-
- y estabilizar el vuelo.
-
-
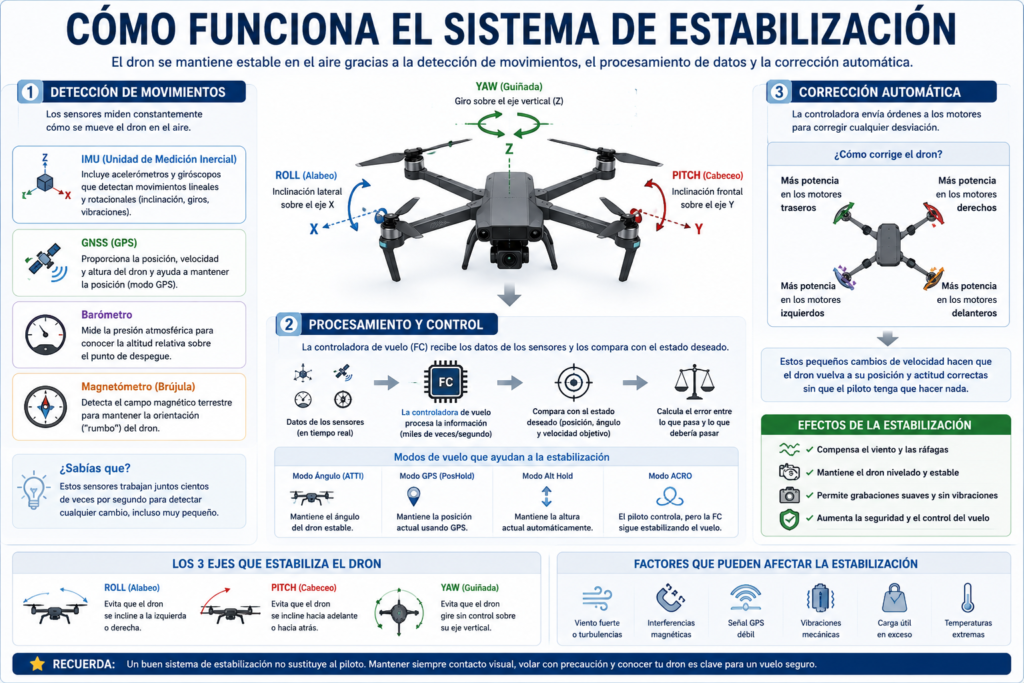
Estabilización automática
Los drones modernos realizan miles de correcciones por segundo.
Esto permite:
-
-
-
- vuelo estacionario,
-
-
-
-
-
- movimientos suaves,
-
-
-
-
-
- control preciso.
-
-
Limitaciones reales
Muchos pilotos principiantes confían demasiado en la estabilización automática.
Sin embargo:
-
-
-
- el viento fuerte puede superar la capacidad del sistema,
-
-
-
-
-
- la lluvia afecta sensores,
-
-
-
-
-
- y una mala calibración puede provocar errores graves.
-
-
Control de altitud
La altitud se controla normalmente mediante:
-
-
-
- barómetro,
-
-
-
-
-
- GNSS,
-
-
-
-
-
- sensores inferiores,
-
-
-
-
-
- controladora de vuelo.
-
-

Error muy frecuente
Pensar que el dron siempre conoce la altura exacta.
En realidad:
-
-
-
- existen errores de medición,
-
-
-
-
-
- variaciones de presión,
-
-
-
-
-
- y limitaciones del GNSS.
-
-
Por eso:
-
-
-
- el piloto sigue siendo responsable de respetar los 120 m máximos.
-
-
Baterías LiPo
Las baterías LiPo (Lithium Polymer) son las más utilizadas en drones.
Ofrecen:
-
-
-
- alta densidad energética,
-
-
-
-
-
- bajo peso,
-
-
-
-
-
- gran capacidad de descarga.
-
-
Riesgos importantes
Las baterías LiPo son sensibles a:
-
-
-
- golpes,
-
-
-
-
-
- sobrecalentamiento,
-
-
-
-
-
- sobrecarga,
-
-
-
-
-
- descarga profunda,
-
-
-
-
-
- perforaciones.
-
-
Señales de batería deteriorada
| Síntoma | Riesgo |
|---|---|
| Hinchazón | Posible incendio |
| Calentamiento excesivo | Daño interno |
| Descarga rápida | Pérdida de autonomía |
| Desequilibrio de celdas | Fallos eléctricos |
Error frecuente de alumnos
Pensar que:
“si la batería enciende, está bien”.
Eso es incorrecto.
Una batería degradada:
-
-
-
- puede provocar pérdida súbita de potencia,
-
-
-
-
-
- activación de RTH,
-
-
-
-
-
- o aterrizaje de emergencia.
-
-
Gestión de batería
La gestión de batería incluye:
-
-
-
- control de temperatura,
-
-
-
-
-
- ciclos de carga,
-
-
-
-
-
- almacenamiento,
-
-
-
-
-
- calibración,
-
-
-
-
-
- monitorización de celdas.
-
-
Buenas prácticas
| Acción | Recomendación |
|---|---|
| Almacenamiento | Carga parcial |
| Transporte | Protección física |
| Carga | Supervisada |
| Uso | Evitar descarga completa |
Firmware del sistema
El firmware es el software interno del dron.
Controla:
-
-
-
- vuelo,
-
-
-
-
-
- sensores,
-
-
-
-
-
- seguridad,
-
-
-
-
-
- estabilidad,
-
-
-
-
-
- funciones automáticas.
-
-
Actualizaciones del sistema
Las actualizaciones pueden:
-
-
-
- corregir errores,
-
-
-
-
-
- mejorar estabilidad,
-
-
-
-
-
- añadir funciones,
-
-
-
-
-
- actualizar geocercas,
-
-
-
-
-
- mejorar seguridad.
-
-
Riesgos de actualizar incorrectamente
Actualizar sin comprobar compatibilidad puede provocar:
-
-
-
- errores de calibración,
-
-
-
-
-
- pérdida de configuración,
-
-
-
-
-
- incompatibilidades,
-
-
-
-
-
- problemas de conexión.
-
-
Error frecuente de examen
Muchos alumnos creen que:
“actualizar siempre mejora automáticamente el vuelo”.
No necesariamente.
Una actualización defectuosa o interrumpida puede generar problemas operacionales.
Limitaciones técnicas de los drones
Todos los drones tienen limitaciones.
Aunque incorporen automatización avanzada.
Principales limitaciones
| Limitación | Consecuencia |
|---|---|
| Viento fuerte | Pérdida de estabilidad |
| Baja batería | Menor autonomía |
| Interferencias | Pérdida de señal |
| Lluvia | Riesgo eléctrico |
| Temperaturas extremas | Menor rendimiento |
| GNSS deficiente | Deriva |
Error muy habitual
Muchos pilotos principiantes creen que:
“si el dron tiene sensores, evitará cualquier accidente”.
Eso es falso.
Los sensores:
-
-
-
- tienen ángulos limitados,
-
-
-
-
-
- pueden fallar,
-
-
-
-
-
- y no sustituyen la responsabilidad del piloto.
-
-
Escenarios operativos reales
Escenario 1
Un piloto despega junto a una nave industrial metálica y observa que el dron deriva ligeramente.
Qué podría estar ocurriendo
La estructura metálica puede:
-
-
-
- interferir la brújula,
-
-
-
-
-
- degradar GNSS,
-
-
-
-
-
- o afectar sensores magnéticos.
-
-
Error típico
Pensar que el problema es únicamente el viento.
Escenario 2
Un dron pierde señal de control detrás de varios edificios.
Posible causa
Pérdida del enlace radioeléctrico.
Qué hará normalmente el dron
Dependiendo de configuración:
-
-
-
- Return To Home,
-
-
-
-
-
- hover,
-
-
-
-
-
- o aterrizaje automático.
-
-
Escenario 3
Un piloto despega con batería parcialmente hinchada porque “todavía funciona”.
Riesgo real
Posible:
-
-
-
- caída de tensión,
-
-
-
-
-
- apagado inesperado,
-
-
-
-
-
- incendio,
-
-
-
-
-
- o pérdida de potencia.
-
-
Escenario 4
El dron indica señal GNSS débil antes del despegue.
Error frecuente
Despegar igualmente confiando en sensores automáticos.
Riesgo
El dron puede:
-
-
-
- derivar,
-
-
-
-
-
- perder precisión,
-
-
-
-
-
- o registrar mal el punto Home.
-
-
Errores frecuentes en el examen
Confundir UAS con dron
UAS incluye:
-
-
-
- aeronave,
-
-
-
-
-
- estación de control,
-
-
-
-
-
- enlace,
-
-
-
-
-
- sensores,
-
-
-
-
-
- software.
-
-
Pensar que GNSS y brújula son lo mismo
No lo son.
-
-
-
- GNSS calcula posición.
-
-
-
-
-
- La brújula detecta orientación magnética.
-
-
Creer que el dron “piensa solo”
Los sistemas automáticos:
-
-
-
- ayudan,
-
-
-
-
-
- pero tienen limitaciones.
-
-
El piloto sigue siendo responsable.
Pensar que Return To Home siempre evita accidentes
RTH depende de:
-
-
-
- señal GNSS,
-
-
-
-
-
- altura configurada,
-
-
-
-
-
- batería,
-
-
-
-
-
- entorno.
-
-
Puede fallar.
Confundir altitud relativa y absoluta
Muchos drones muestran:
-
-
-
- altura relativa al punto de despegue,
-
-
-
-
-
- no altura real sobre el terreno.
-
-
Diferencias importantes
GNSS vs brújula
| Sistema | Función |
|---|---|
| GNSS | Posición |
| Brújula | Orientación |
Sensor barométrico vs GNSS
| Sistema | Función principal |
|---|---|
| Barómetro | Altitud relativa |
| GNSS | Posicionamiento global |
Estabilización vs navegación automática
| Función | Objetivo |
|---|---|
| Estabilización | Mantener control |
| Navegación | Mantener posición/ruta |
Consejos prácticos para el examen AESA
Si aparece pérdida de señal, piensa en failsafe
Las preguntas suelen centrarse en:
-
-
-
- RTH,
-
-
-
-
-
- pérdida enlace,
-
-
-
-
-
- comportamiento automático.
-
-
Si mencionan edificios o estructuras metálicas, sospecha problemas GNSS o brújula
Muy habitual en preguntas trampa.
Cuidado con preguntas sobre baterías
AESA suele preguntar:
-
-
-
- almacenamiento,
-
-
-
-
-
- riesgos,
-
-
-
-
-
- temperatura,
-
-
-
-
-
- autonomía.
-
-
Las funciones automáticas NO eliminan responsabilidad del piloto
Esto aparece muchísimo en examen.
Mini resumen técnico final
-
-
-
- Un UAS incluye mucho más que el dron.
-
-
-
-
-
- El sistema de control integra sensores, GNSS y órdenes del piloto.
-
-
-
-
-
- El enlace de control es esencial para mantener el mando operativo.
-
-
-
-
-
- Los sensores ayudan a estabilizar y posicionar el dron.
-
-
-
-
-
- El GNSS permite navegación y Return To Home.
-
-
-
-
-
- Las baterías LiPo requieren manejo cuidadoso.
-
-
-
-
-
- El firmware controla funciones críticas del sistema.
-
-
-
-
-
- Las funciones automáticas tienen limitaciones.
-
-
-
-
-
- El piloto sigue siendo responsable de la operación.
-
-
FAQ avanzada sobre conocimiento general de los UAS
¿Puede un dron volar sin GNSS?
Sí.
Muchos drones pueden mantener vuelo manual o modo ATTI sin posicionamiento satelital.
Sin embargo:
-
-
-
- pierden precisión,
-
-
-
-
-
- y deriva con el viento.
-
-
¿El Return To Home funciona siempre?
No.
Depende de:
-
-
-
- señal GNSS,
-
-
-
-
-
- batería,
-
-
-
-
-
- configuración,
-
-
-
-
-
- obstáculos,
-
-
-
-
-
- y correcto registro del punto Home.
-
-
¿La brújula sirve para medir altura?
No.
La brújula detecta orientación magnética.
¿Un dron puede perder señal aunque esté cerca?
Sí.
Las interferencias y obstáculos pueden afectar el enlace incluso a corta distancia.
¿Las baterías LiPo pueden incendiarse?
Sí.
Especialmente por:
-
-
-
- golpes,
-
-
-
-
-
- sobrecarga,
-
-
-
-
-
- perforación,
-
-
-
-
-
- altas temperaturas.
-
-
¿Actualizar firmware es obligatorio?
No siempre.
Pero muchas actualizaciones corrigen:
-
-
-
- errores,
-
-
-
-
-
- seguridad,
-
-
-
-
-
- estabilidad,
-
-
-
-
-
- y compatibilidad normativa.
-
-
¿Los sensores anticolisión detectan cualquier obstáculo?
No.
Tienen:
-
-
-
- limitaciones de ángulo,
-
-
-
-
-
- alcance,
-
-
-
-
-
- iluminación,
-
-
-
-
-
- y condiciones ambientales.
-
-
¿Qué ocurre si falla el barómetro?
El dron puede:
-
-
-
- perder precisión de altitud,
-
-
-
-
-
- variar altura,
-
-
-
-
-
- o tener comportamiento inestable.
-
-
Fuentes oficiales y normativa aplicable
Continuar con el curso de drones A1/A3
Accede al siguiente contenido del curso y continúa preparando el examen oficial de piloto de drones A1/A3 con teoría resumida, ejemplos prácticos y test por temas.
📚 Temas principales del curso
➡ Siguiente tema recomendado
🚀 Pon a prueba tus conocimientos
Accede al centro de tests y practica este tema con preguntas tipo examen, corrección automática y explicaciones. Ir al centro de tests